 한국어
한국어-
 English
English -
 Français
Français -
 日本語
日本語 -
 Deutsch
Deutsch -
 tiếng Việt
tiếng Việt -
 Italiano
Italiano -
 Nederlands
Nederlands -
 ภาษาไทย
ภาษาไทย -
 Polski
Polski - 한국어
-
 Svenska
Svenska -
 magyar
magyar -
 Malay
Malay -
 বাংলা ভাষার
বাংলা ভাষার -
 Dansk
Dansk -
 Suomi
Suomi -
 हिन्दी
हिन्दी -
 Pilipino
Pilipino -
 Türkçe
Türkçe -
 Gaeilge
Gaeilge -
 العربية
العربية -
 Indonesia
Indonesia -
 Norsk
Norsk -
 تمل
تمل -
 český
český -
 ελληνικά
ελληνικά -
 український
український -
 Javanese
Javanese -
 فارسی
فارسی -
 தமிழ்
தமிழ் -
 తెలుగు
తెలుగు -
 नेपाली
नेपाली -
 Burmese
Burmese -
 български
български -
 ລາວ
ລາວ -
 Latine
Latine -
 Қазақша
Қазақша -
 Euskal
Euskal -
 Azərbaycan
Azərbaycan -
 Slovenský jazyk
Slovenský jazyk -
 Македонски
Македонски -
 Lietuvos
Lietuvos -
 Eesti Keel
Eesti Keel -
 Română
Română -
 Slovenski
Slovenski -
 मराठी
मराठी -
 Srpski језик
Srpski језик -
 Español
Español -
 Português
Português


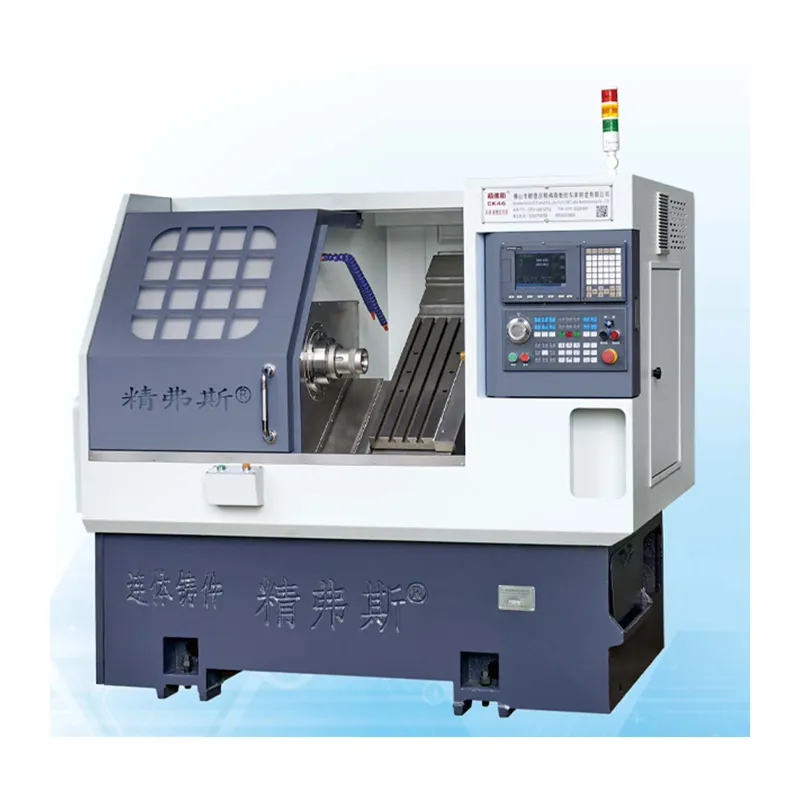
CNC 선반의 진동을 제거하는 방법은 무엇입니까?
진동에 대한 여러 가지 이유가 있습니다CNC 공작 기계. 제거 할 수없는 전송 클리어런스, 탄성 변형, 마찰 저항 등과 같은 기계적 요인 외에도 서보 시스템의 관련 매개 변수의 영향도 초점입니다.
1. 위치 루프 게인을 줄입니다
비례 적분기는 다기능 컨트롤러입니다. 전류 및 전압 신호에서 비례 적 이득을 효과적으로 수행 할 수있을뿐만 아니라 출력 신호 지연을 조정하여 전진 할 수 있습니다. 발진 실패는 때때로 출력 전류 및 전압의 지연으로 인해 발생합니다. 현재 출력 전류 및 전압 위상은 PID에 의해 조정될 수 있습니다.
2. 폐쇄 루프 서보 시스템으로 인한 진동
일부 CNC 서보 시스템은 반 부패 루프 장치를 사용하며 전체 폐쇄 루프 서보 시스템은 로컬 반 결국 루프 시스템이 진동하지 않는다는 전제에 따라 매개 변수를 조정해야하므로 둘이 비슷합니다.
3. 고주파 억제 기능을 사용하십시오
위의 논의는 저주파 진동에 대한 매개 변수 최적화 방법에 관한 것입니다. 때때로 CNC 시스템은 몇 가지 기계적 진동 이유로 인해 피드백 신호에서 고주파 고조파를 생성하여 출력 토크를 불안정하게 만들고 진동을 생성합니다. 이 고주파 진동의 경우 1 차 저역 통과 필터 링크를 토크 필터 인 스피드 루프에 추가 할 수 있습니다.
문의 보내기


X
당사는 귀하에게 더 나은 탐색 경험을 제공하고, 사이트 트래픽을 분석하고, 콘텐츠를 개인화하기 위해 쿠키를 사용합니다. 이 사이트를 이용함으로써 귀하는 당사의 쿠키 사용에 동의하게 됩니다.
개인 정보 보호 정책